「日本はロボット大国であるはずなのに、なぜ米国製ロボットなのか」福島第一原発の爆発事故から1ヶ月後の2011年4月17日、原子炉建屋内の状況を把握するため米国製のロボットが投入されると、そのような声があがった。だが、それから数ヶ月後には国産ロボットが投入され、米国製のロボットでは成し得なかった数々の成果を得ることになる。
このロボットの開発に携わったグループの1つが東北大学の田所研究室。その研究室に所属するメンバーの1人が大野和則准教授である。「今回の活動によって確かな成果が得られた一方、多くの課題もわかりました。ただ、課題がわかったことで我々がつくるロボットの“幅”は急速に広がりつつあります」福島第一原発の経験を生かし、急激に進化を遂げるレスキューロボットの現場を訪ねた。
きっかけは阪神・淡路大震災
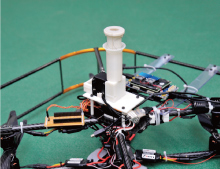
「これを見てください」大野准教授はそう言って1つのロボットを見せた。ラジコンのヘリコプターが球体の檻に囲まれている。なぜこのような不思議な形状をしているのか。檻の中にあり、ヘリコプターはどのようにして飛ぶのか。

「実は、今開発中のレスキューロボットの1つなんです」大野和則准教授。筑波大学大学院から神戸大学を経て、2005年に田所諭教授とともに東北大学へと移ってきた。田所研究室が研究するテーマのうち、柱となる1つがレスキューロボットだ。「この研究室ができたそもそものきっかけは、1995年の阪神・淡路大震災です。ロボット大国であるにもかかわらず、被災者救出のためにロボットがまったく使われていない。それにショックを受けた田所教授がレスキューロボットの研究を始めました」
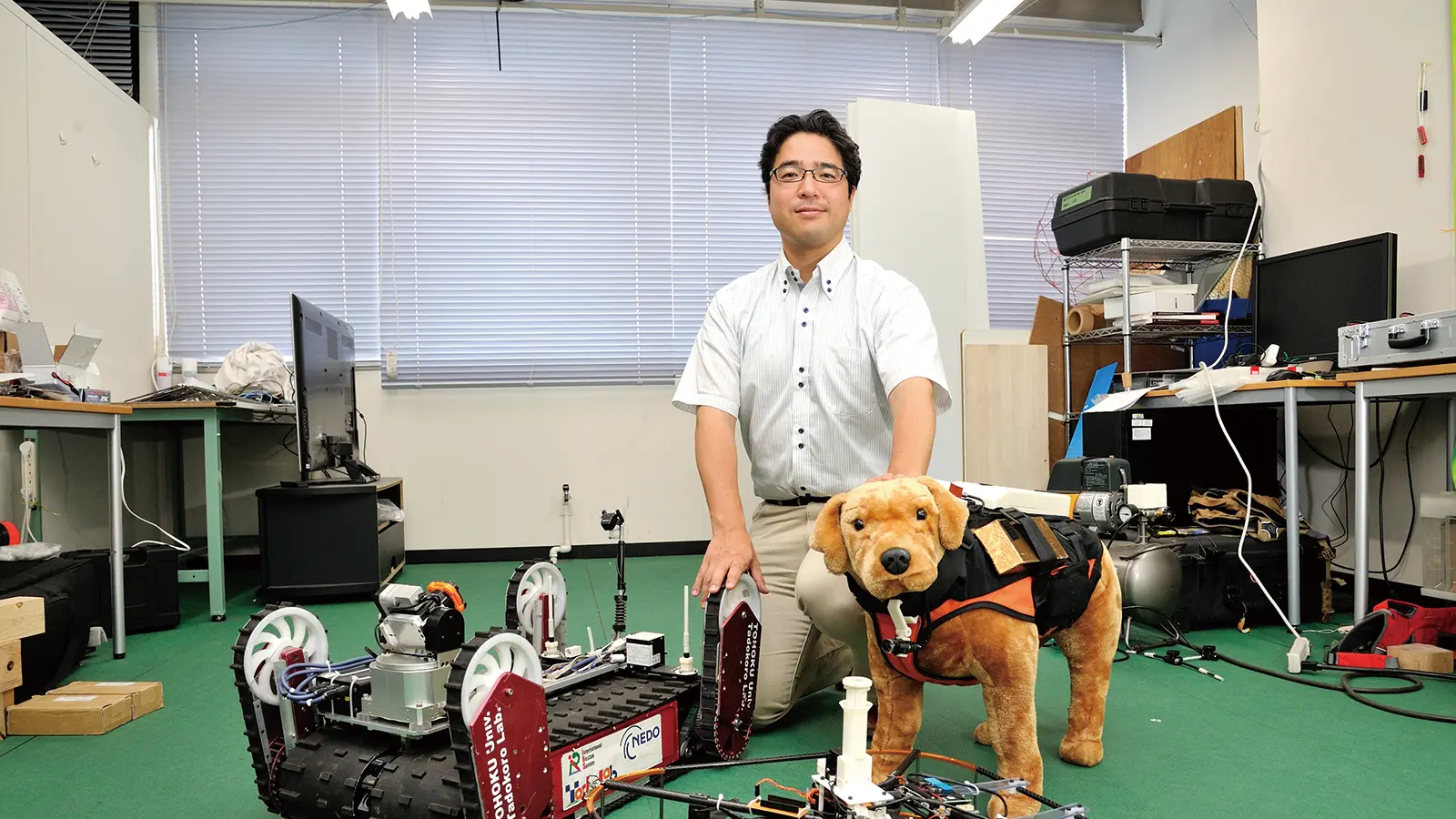
大野准教授は田所教授の活動に賛同し研究室のメンバーとなり、さまざまなロボットを開発していくことになるが、そのなかでも代表的なものが「Quince(クインス)」である。Quinceのようなクローラロボットの研究開発は文部科学省の「大都市大震災軽減化プロジェクト」として本格的にスタート。その後、NEDO(新エネルギー・産業技術総合開発機構)の「戦略的先端ロボット要素技術開発プロジェクト」に千葉工業大学、国際レスキューシステム研究機構などとともに参画する。このプロジェクトは2006年度から始まり、それぞれの得意分野を分担する形で研究が進められた。
「地下で起こった火災などは、奥まで行かないと原因が特定できません。しかし人が奥に入ると巻き込まれる可能性があります。そこで人の代わりに奥まで行けるロボットをつくろうと開発されたのがQuinceでした」
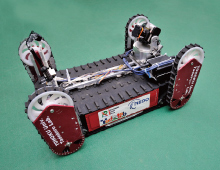
形は独特だ。戦車のように全身にクローラ(一般にキャタピラと呼ばれる)を身にまとい、四隅には腕のように稼働するサブクローラが付いている。基本的な走行は全身のクローラで行い、大きな段差があるときに四つの腕を使い段差を乗り越える設計だ。全長665mm、幅480mm、高さ225mm。カメラによって周囲の状況を確認し、無線による遠隔操作で動かしていく。その性能は極めて高く、アトランタで開かれたロボカップ世界大会の「レスキューロボットリーグ」の運動性能部門で優勝したほどだ。そして、7年間のプロジェクトがあと数週間で終わろうかというまさにそのとき、福島第一原発での事故が起きた──。
抜群の走行性能を発揮
「福島第一原発の事故を見て、我々研究者はなんとかしたいと思っていました。そこで私を含めた研究者が千葉工業大学に集まり会議を重ねたのです。未知数な部分はあるにせよ、日本で福島第一原発に投入できるのはロボットの中で最も運動性能に優れたQuinceしかないだろうという考えで一致していました」
しかしQuinceは原発事故を想定した仕様にはなっていないため、その導入には課題があった。障壁は大きく2つ。1つは遠隔通信。Quinceは無線で遠隔操作を行う設計だったが、原子炉建屋内は放射線を遮るため分厚いコンクリートで作られており電波が届かないことが想定された。
もう1つの問題は耐放射線特性。放射線の影響によりダメージを受け、電子部品が故障するなどの誤作動を起こす可能性があった。そこで、無線が使えるかどうかを調べるために廃炉準備中の浜岡原発1号機で無線実験を行うが、やはり無線は使えないという結論になった。そうなると有線で対応せざるを得ない。耐放射線の検証実験も行った。計4回に及ぶ実験の末、Quinceは200シーベルトまで耐えられると判断。検討の結果、原発仕様にするため既存の改良ではなく一からつくり直すことになった。
Quinceが検証実験やつくり直しをしている間、福島第一原発の1~3号機にアメリカの軍事用ロボット「Packbot」が投入される。ところが走行性能に難があり、入ることができたのは1階のみだった。原発仕様のQuinceは急ピッチで製作が進められた。Quinceで大野准教授が深くかかわったのが、3次元の計測能力だった。
「3次元を計測するスキャナはかなり前から開発していましたが、2007年ごろに仙台の地下鉄で実験したときは測定するたびに一度立ち止まる必要があり、走っては止まり、走っては止まりと、計測に時間がかかりすぎていました。そこで異なるタイミングで入ってくるセンサデータの時間をうまくシンクロさせる方法で、止まらずして3次元空間を正確に測定できるようにしました」
原発仕様のQuinceには、有線操作に必要な光ファイバリールのほか、放射線測定器、汚染水調査用の水位計なども付けられた。一見以前のQuinceと同じだが、大野准教授曰く「中身はまったく違うロボット」に仕上がった。2011年6月24日より福島第一原発2号機建屋内に投入。その後、断続的に調査が行われた。「Packbotは1階までしか入れませんでしたが、走行性能の高いQuinceは急こう配の階段も上り、2~5階も探索し、放射線量を測定することができました。放射線量がわかり、作業員を建屋内に入れる計画が立てられるようになったことが一番大きな成果だったと思います」そしてこの経験が、のちのロボット研究に生きていくことになる。
続々開発される新たなロボット
Quinceは放射線量を測定するなどの貢献をしたが、決してすべてが順風満帆だったわけではない。瓦礫の山を前にどうしても進むことができず引き返したこともあった。「たとえば大学などで大きな本棚が倒れると、それをQuinceが乗り越えるのは簡単なことではありません。そこで開発を始めたのがヘリコプター型ロボットの研究でした」
この研究は、Quinceにヘリコプター型ロボットを乗せて行けるところまで行き、それ以上進めなくなったときにヘリコプター型ロボットを飛ばして探索するというものだ。だが、瓦礫で埋もれた空間で電動式ヘリコプターをマニュアルで操縦するのは困難を要し、飛行時間も搭載バッテリ重量の関係から10分程度と短い時間しか見込めない。「どれくらい水が出ているのか知りたいとなると、動画がどうしても必要になります。そうなると、ホバリングしながら一か所に止まって撮影し続ける必要がある。10分では全然足りず、30分はほしいところです」
マニュアル操縦をせずに済むよう、米国カーネギーメロン大学の研究者らとともにセンシングによる自己位置推定に基づいて自動で飛行、探索する自律性を備えた。さらに、電動式ヘリコプターに吸着機構を取り入れ、天井などに吸着しクモのように垂れ下がることで、プロペラ駆動なしで目的の場所に30分間留まることが可能になった。
そしてこの飛行ロボットはさらに進化を遂げる。屋内の狭い場所をヘリコプター型ロボットが飛ぶのはリスクが高く、場合によっては瓦礫などに当たって壊れてしまう可能性もある。そこで、球体の囲いにヘリコプターを入れる構造にした。いろいろな方向に回すことのできるジンバル機構が球体とヘリコプターの間にあり、ぶつかっても外側の球殻だけが動き内側は保護される。仮に墜落してもプロペラは守られ、再飛行も可能だ。
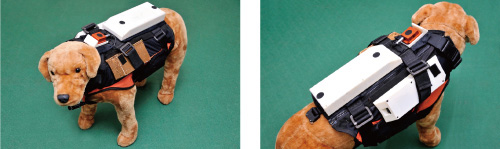
「今、レスキューロボドッグの研究もしています。犬は人と違って瓦礫の上をスイスイと進んで行きます。その機動力を生かそうというわけです。ただし、犬が集中できるのは1、2時間。それを過ぎると疲れてしまって反応がにぶくなる。そんな時でもここに人がいるかもしれないとかすかに反応していることがあり、その『声なき声』を可視化することができれば被災者の救助につながるのではないかと研究をしています」
以前からの研究にはすでに商品化されたものもあり、瓦礫のなかのごく狭い場所を探査するために使われる「能動スコープカメラ」はメーカーからすでに発売されている。Quinceもその後、原発用にさらに開発が進み、現在は重工業系のメーカーが販売している。
次々と研究成果を上げていく田所研究室。大野准教授は研究開発がスピード化した陰に、ある立役者がいるという。
「3Dプリンターです」
人に役立つ工学を
「周りの研究者から、『3Dプリンターを導入すると、ものづくりが変わるよ』と度々聞いていました。私は機械系なのですが、機械加工にはたくさんの時間と労力がかかり、もっと簡単にできないものかとずっと思っていました。そこで2009年に『uPrint』を導入しました」
大野准教授は、仲間の研究者の言葉の意味をすぐに悟る。「データを流すだけでいいので、研究室の学生に『明日までにつくっておいて』と簡単に頼める。開発のスピード感は圧倒的でした」もう1つ大きな変化は、「オリジナルの形」ができることだ。たとえば先に紹介したレスキューロボドッグの場合、それまでは犬の背中に機械を乗せるのに市販の箱を使っていた。しかしそれでは収まりが悪く、大野准教授曰く「犬に歩くことを拒まれる」ほどの出来だった。そこでCADで設計し3Dプリンターで形状を確認、何度か調整を重ねた結果、犬の身体に密着するようにすっきりと収まり、以前と同じ重量にもかかわらず犬が機敏に動いてくれるようになった。

「2012年には同じ東北大学内にある『次世代移動体システム研究会』で『FORTUS400mc』も導入しました。ワークサイズが大きくなり、さらにいろいろなものがつくれるようになりました。また、地元の中小企業にも格安で使ってもらっており、地域活性化につながればと思っています」
現在、大野准教授はレスキューロボットとは別に、工場内で運搬車両が自律的にものを運んでくれる自律搬送車両の開発にも着手している。「日本企業は人件費の高い国内に工場を建てようとせず、海外に工場が出て行っています。でもロボットで人件費が安くなれば、日本に工場が戻ってくる可能性があるわけです」大野准教授は「人に役立つ工学」をモットーとして掲げている。
阪神・淡路大震災を教訓にして生まれたQuinceは福島第一原発で役立ち、さらに商品化により世界中に広まり役立とうとしている。東日本大震災。その教訓を生かし、大野准教授ら田所研究室のメンバーは安全で安心して暮らせる豊かな社会の実現に向けて研究を進めている。