日本が世界に誇るロボット技術。
なかでも人型ロボット(ヒューマノイド)は日本のお家芸ともいわれる。
その第一人者が早稲田大学の高西淳夫教授だ。
ロボットの研究を始めたのは1979年。
以来、30年以上にわたってロボットの研究に勤しみ、数多くのロボットを開発してきた。
人とそっくりな動きをするヒューマノイドや、医療・福祉分野でもロボットを開発しており、
すでに商品化されて世の中に貢献しているものも多い。
だが高西教授は意外な心のうちを明かす。
ロボット研究の最前線にいる研究者に見えている風景とはどんなものなのか。
高西教授に迫った。
つくるロボットに共通する思い 「人間に近づける」
取材場所は「TWINS(ツインズ)」だった。
正式名称は「東京女子医科大学・早稲田大学連携先端生命医科学研究教育施設」。東京女子医科大学の「医学」と早稲田大学の「理工学」の融合を目ざして2008年につくられた研究施設で、東京女子医大のT、早稲田のW、institutionを組み合わせて「TWINS」となった。土地の広さは2,000坪、双方の大学を合わせて約500名が在籍している巨大な建物だ。高西教授の研究室もこの施設の中にある。

「東京女子医大と早稲田大学は場所が近いこともあり、40年以上前から連携が生まれていました。国有地の払い下げを両大学が共同購入し、融合によって新領域を開拓しようとTWINSが誕生しました。2大学による1つの研究施設の共同運営は日本では初めてのことです」
もっとも代表的な研究が「二足歩行ロボット」で、「情動表出ロボット」もよく知られている。通常の表情のほかに、喜び、怒り、驚き、悲しみ、恐れ、嫌悪の6つの表情ができ、センサによって外部の情報を得て、まゆ、口唇、顔色、首、腕、手、腰を動かして幅広い表情の表出を可能にしている。
また、フルートやサックスを奏でるロボットも高西教授が開発したものだ。フルートやサックスをロボット自らが手でもち、指と舌を動かしてプロ顔負けの演奏をする。
こうしたヒューマノイドのほかに、もう1つ高西教授の研究開発の柱になっているのが医療・福祉用ロボットだ。
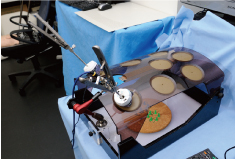
実用化されたものの1つが医学部学生や初期研修医向けに開発した「縫合手技(しゅぎ)評価シミュレータ」である。外科手術で基本となる縫合を人工の皮膚上で体験できるようにしただけでなく、針がけや糸結びをしたときの皮膚の動きをとらえ、縫ったあとを小型カメラで撮影し画像処理することで、縫合間隔、縫合幅など6項目の評価と総合スコアが0~100点の間で表示される優れものだ。
このように数多くのロボットを開発してきている高西教授だが、開発するロボットに共通する思いがあるという。
いかにして人間に近づけるか、である。
人の役に立つ人間化するロボット
人間に近づける──。
高西教授にはある原体験がある。

「私は日本で最初にロボット研究を始めた加藤一郎先生のゼミに入り、最初の選んだテーマが『義手』でした。義手はふつうにつくるとメカっぽくなってしまうのですが、義手を必要とする方から出る要望は『機構が見えないようにしてほしい』『音が出ないようにしてほしい』というものでした。つまり、人前に手を出したときに義手とわからないようにしてほしいというわけです」
求められる「人間そっくり」という要望。これ以後「人間に近づける」が高西教授の大きな目標となる。
義手の研究ののちに高西教授は二足歩行ロボットの研究へと移るが、当時、まだ人と同じような歩きをする二足歩行は可能になっていなかった。試行錯誤の末、人の歩行動作を数値化することに成功し、これにより世界で初めて、身体の勢いを利用してスムーズに歩く下半身だけの二足歩行ロボットを実現する。1984年のことだ。その後、様々な改良を行ない、上半身をもつロボットを開発した。
しかし、これはまだ一般的なロボットと同じ「膝を曲げて歩く」タイプだった。ところが長い時を経て、一気により人間らしいロボットへと変化を遂げる。
「リハビリテーションの専門家から『人が膝を曲げないで歩けるのは骨盤が動いているから』という話を耳にしました。その一言をヒントに、骨盤があればロボットも人と同じように膝を曲げずに歩けるのではないかと腰部機構の開発を進め、実現したのがWABIAN-2という膝がまっすぐに伸びるロボットです」
この“あまりに人間らしい”歩き方をするWABIAN-2は高い評判を呼び、2005年の愛知万博で展示されるまでになった。
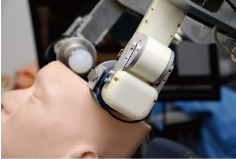
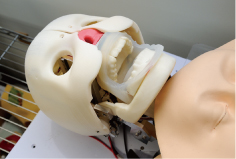
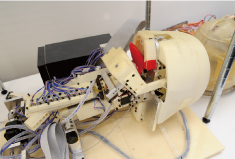
また、事故や病気などで呼吸困難な患者に対して呼吸を確保するために気管挿管(きかんそうかん)が行われるが、気管ではなく食道に挿管してしまうなどというように事故が多い。そこで高西教授が気管挿管の訓練用に開発したものが人間の上半身の形をした「気管挿管訓練シミュレータ」である。
「中にセンサを入れることで酸素供給用のチューブが気管のなかで適切な位置まで入っているか、無理な力がかかっていないか、ということがわかるだけでなく、舌根沈下(ぜっこんちんか)といって舌が気道側に下がって気道をふさいでしまう現象も再現し、16個ものモーターによって下あごや喉の筋肉も人間のように動くようにしました」
これまでも訓練用のマネキンはあったが、人と同じ動きを再現することで、よりリアルな気管挿管の訓練が行えるようになった。
このように、高西教授はロボットを“人間に近づける”ことで人間らしい動きをするロボットを実現してきた。だが高西教授はこう語る。
「研究すればするほど、目標とする人間が遠くなっていくんです」
人間に近づくために見つけた手法
「たとえば」高西教授は言う。
「人の皮膚は数百万個もの痛覚や温覚があります。また、人にはさまざまな筋肉があってその数は600ともいわれています。ヒューマノイドに600個ものアクチュエータをつけたら、重くて動かすことができないんですね。また筋肉1つをとってみても、力を出す以外に、血液を送り出したりクッションの役割があったりと実に多機能にできている。これをロボットで再現するのはとても難しいことなんです。人間を知れば知るほど、とても巧妙につくられていることがわかり、それを具現化することがいかに困難なことかがわかってくるのです」
模倣しようとすればするほど立ちはだかる壁。にもかかわらず、高西教授は「人間に近づく」というチャレンジをやめることはしない。理由は明快だ。人間に近づくことが、ロボット工学の視点から、人間の身体や心のメカニズムの解明につながるからだ。
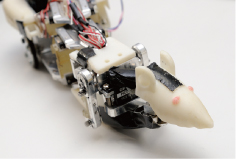
「以前、人間がどのように物を噛んで食べているのかを調べるために『咀嚼(そしゃく)ロボット』というものを開発しましたが、これによって人間の顎がロボット工学的に解明でき、『顎運動障害者用治療ロボット』の開発につながりました」
顎関節症は国内に200万人の患者がいるといわれ、口を開けようとするときに顎の関節を中心に痛みが出る病気で、治療には大きな痛みを伴う。高西教授は咀嚼ロボットを使い、モノを噛むときにある種の筋肉の力の入れ方をすると、顎の関節にほとんど力を入れずにモノが噛めることを発見。この成果を治療用ロボットに応用することで、痛みもなく治療できるようになった。
もっと人間に近づけられないだろうか──。
高西教授は、これまでにない新たな手法を考え出す。
果てしのない「人間」の謎を解いていく
高西教授が注目したもの、それは3Dプリンターだった。
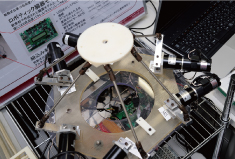
「私の研究室で3D CADを使い始めたのは1990年代後半で、それまでは旋盤やフライス盤などを組み合わせて加工していました。3D CADで3Dデータができるようになると、高い精度でそのまま形にしてくれるものとして『3Dプリンター』に注目し、2008年に3Dプリンター『Dimension(ディメンジョン)』を導入しました」

これにより、外注してつくらざるを得なかった加工が学内ですぐにできるようになり、ロボット用のちょっとした部品もつくれるようになるが、高西教授がひらいめいたのは3Dプリンターを『型』として使うことだった。
「唇や手、舌といったものは特殊なやわらかいハイテク素材を使っていましたが、型には金属を使っていました。しかし金属では不必要に硬く時間も手間もコストもかかっていた。これを3Dプリンターで造形すれば簡単にできることに気づいたのです。さっそくやってみたところ問題なくでき、3Dプリンターは『加工』だけでなく『成型』にも大きな役割を果たすことがわかりました」
フルートを演奏するロボットでは、フルートの神様と呼ばれたマルセル・モイーズの奏法を受け継いだフルーティストと共同研究を行い、唇とフルートのベストな相対位置であるゼネラルポジションという位置決め法を実現。師匠から弟子への伝承でしか伝えられなかった奏法のロボット工学的なメカニズムの解明につなげた。
「二足歩行をする、フルートを演奏する、情動表出など、『単機能』であれば人間にある程度近づくことはできると思います。ただ、人間のすごいところは、あらゆる場面、状況、場所においていろいろなことができることなのです。『ゼネラルマシン』を実現することが本当の意味で人間に近づくことだと思いますが、これは現実的にはまだまだ先になるでしょう。やはり人間はまだまだ遠いなぁ、と思います」
研究すればするほど、目ざすべき山のいただきはどんどん高くなっていく。しかし、「人間に近づく」ことを目ざすことで人間の仕組みが解明されていく。
高西教授が義手からヒューマノイド研究の道に入ったのは、二足歩行の研究チームの先輩にこう言われたからだったという。
「自分たちが開発したロボットが街中を歩いている姿を想像してごらんよ。そんな人間とロボットが共存する社会が実現できたとすれば、自分たちはその一部に携わっている研究者ということになる。それは素晴らしいことだと思わないか」
あれから33年。あのときの思いを胸に、高西教授は一歩一歩その歩を進めている。